
The Air-Core Approach
Air-core movements are robust gauge mechanisms commonly used in automotive and marine gauges. An air-core is simply a very basic electric "motor" with a permanent magnet rotor and no commutating brushes. It's called an "air-core" because there is no iron in the magnetic path. It really has plastic in the magnetic path instead of air, but "plastic-core" just didn't make it.
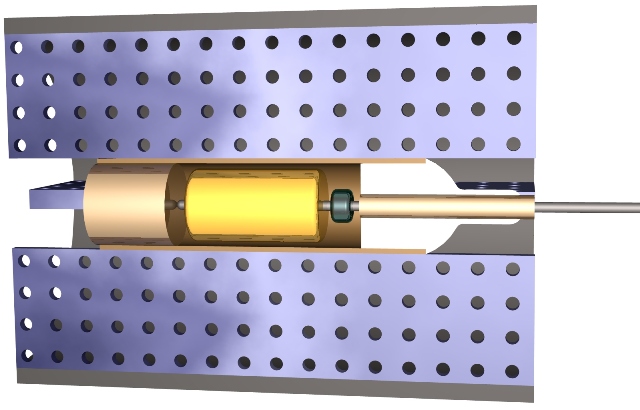
This illustration shows the key components of an air-core movement. The heart of the movement is the rotor. It's frequently a cylindrical ceramic magnet mounted on a stainless steel shaft. The magnet is magnetized through its diameter so the poles are on the curved surface. Stainless steel is used because it's strong and doesn't rust. Rust formation would increase bearing friction and gauge accuracy would suffer. The rotor is supported by a two-piece housing (the blue pieces). These are typically injection molded plastic with a low coefficient of friction. The housing supplies the bearing surfaces for the rotor shaft, so a low friction material is important. For example, a nylon-like plastic loaded with Teflon flakes might be used. Once the housing is closed, it forms a bobbin that supports a pair of windings. I've shown each winding as two halves because the windings are wound symmetrically on the bobbin. Half of a winding is on one side of the rotor and the second half is on the other side. With the windings in place, the whole assembly gets stuck into an annealed steel cup to shield the movement from external magnetic influences.
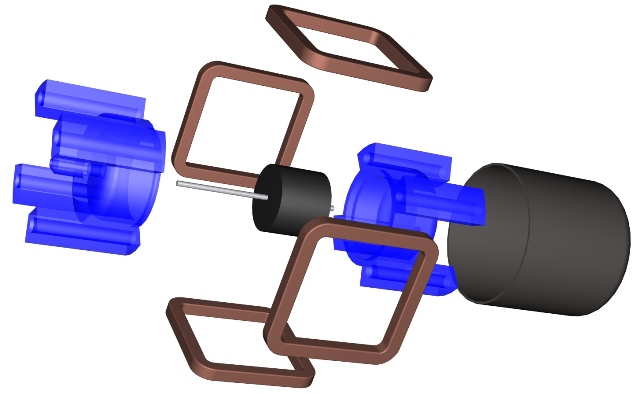
Currents through the windings create a magnetic field that the rotor aligns itself with. By changing the magnitudes of the currents you can change the direction of the field, and hence the orientation of the rotor and the pointer on its shaft.
Some hobbyists have made use of junked automotive and truck speedometers and engine gauges. If you are fortunate enough to have access to a junkyard with reasonable prices, consider it as an option.
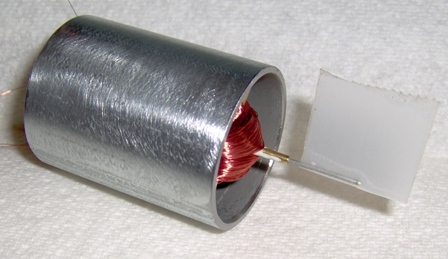
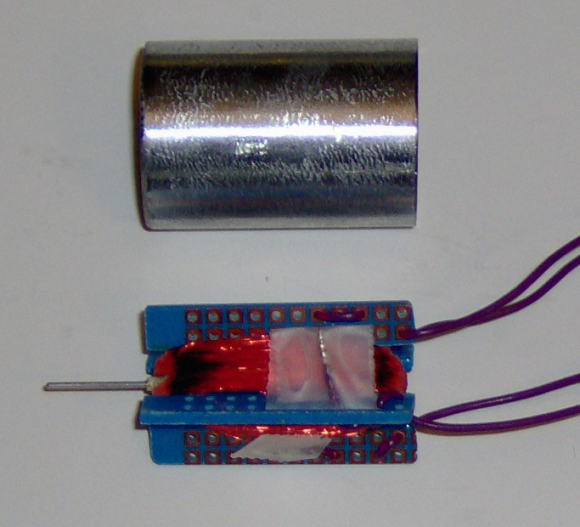
This is a commercially manufactured air-core movement removed from an after market tachometer. (Not a particularly cost effective approach for getting one.)
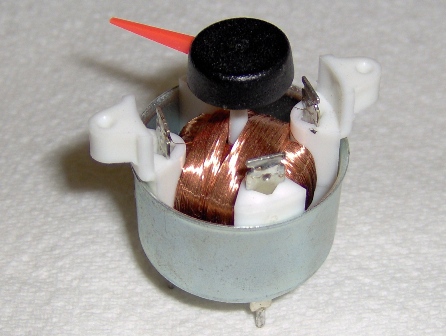
This, and similar, air-core movements are made in vast quantities for use in the automotive and marine markets. Unfortunately they do not seem to be easily available at reasonable cost to the hobbyists. You either pretend to be an OEM and buy a zillion of them, or you buy an after market tachometer to disassemble. Neither approach is particularly appealing to those of us looking for a bargain.
Fortunately, air-core movements really are simple and making one from scratch is quite doable. Most materials are available from the local craft or hobby store. The fine gauge wire used for the coils may have to be ordered, or you may be lucky enough to find a local supplier. In any case, with a bit of effort you can turn out a home made air-core like the ones to the left. They are a little larger than the commercial units, but just as functional.

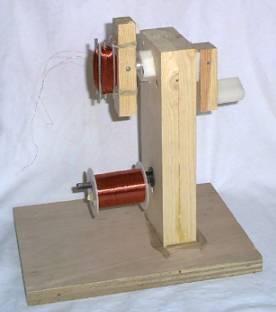
There is a lot of wire on an air-core. Winding by hand get tiring very quickly. After about a half dozen air-core prototypes, a coil winding jig was built to speed up the process. Thoughts of using an electric drill did come to mind, but there seemed no simple way to accurately count the number of turns.
The big guys used specially designed chips to drive air-core movements. These chips take one of two approaches. The first (and older) approach makes use of an analog function generator. Typified by the now obsolete National LM-1819 (the ON Semiconductor CS4121, CS8191 & CS289 are similar), these chips are limited to driving the pointer through only 305 degrees of an arc. The second approach is digital in nature and is fundamentally a specialized DAC (digital to analog converter) meant to be operated under microprocessor control. (For example, the ON Semiconductor CS4122 & Phillips SA5775/8.) In general these chips are not readily available. Being rather specialized with few volume users, they are not typical stock items. Still, it's worth looking at the spec sheets and application notes on the respective manufacturers' web sites. There is a lot of useful, and free (!) information available about air-core movements. Fortunately these chips are not necessary to make use of air-core movements.
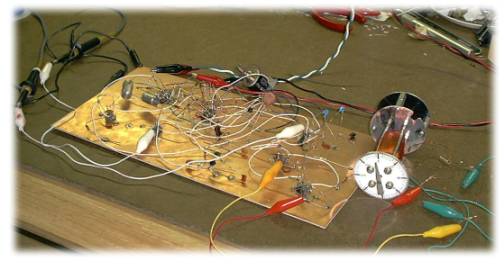
The air-core movement itself requires two signals to drive it, one for each coil. You could drive it using two channels from something like the EPIC gauge module, though that would be rather expensive. (The EPIC gauge module is designed to make use of the National LM-1819. If you can't get the chip or a suitable substitute, you would need a channel for each coil.) A handful of relatively inexpensive electronic components can generate the required coil drive signals from a single analog control voltage. This approach is less expensive in that it cuts down on the number of required channels, EPIC or otherwise. The prototype circuitry pictured below takes an analog approach to driving air-core movements. The hard to find commercial chip is priced between three and a half and seven dollars, depending upon quantity and the phase of the moon. Plus, it takes a small handful of additional parts to get it up and running.
The prototype circuitry below uses five chips costing between 25¢ and 45¢ each. There are also a pair of cheap voltage regulators and a moderate handful of small parts. Price-wise, the two approaches are similar though clearly the prototype takes a bit more assembly time. The prototype has a couple of advantages over the commercial analog chips. While the commercial chip is spec'd for use over 305 degrees, the prototype will drive an air-core movement something over 500 degrees; almost one and a half revolutions. And second, the parts for the prototype are much more readily available.
Another approach is to use a micro controller to provide the interface to the host PC, as well as, generating two analog voltage outputs that can be used to drive the air-core coils. It's not necessary that the micro controller have analog outputs. An analog voltage can be generated from a single digital output through pulse width modulation. The micro controller uses a timing loop to control how long the digital output remains on and off. For example, if the output is continually switched on and off such that it's on a quarter of the time, the average voltage will be a quarter the digital "high" voltage. The pulsed output is to a driver to develop the voltage and power levels required to drive the air-core.
There are any number of micro controllers that can be used for this. I just happen to favor the Microchip PIC16F628. It costs about $3US, incorporates a USART that makes RS232 interfacing trivial, has on chip timers and is flash programmable. Further, Microchip makes the assembler, editor and simulator available as a free download. Check out the PIC information links for this and more. [Update: these days I use a PIC16F648A.]
The picture below is PIC-based air-core driver that makes use of an H-bridge power driver to feed sine and cosine weighted pulses to the movement's stator coils. The PIC interfaces to a PC serial com port.

Air-core movements can swing a light weight pointer around and work well for simulated engine gauges, tachometers, air speed indicators, and the like. They have rapid pointer movements, and are quiet. They can be used to make some quite realistic simulated instruments.
The fuel gauge is simply an air-core movement packaged to look like an aircraft gauge. It is meant to be used with external electronics to drive it. The VSI is a self contained unit incorporating a PIC micro controller that both generates pulse width modulated signals to excite the air-core, and provides an RS-232 serial interface to the host PC. Both gauges have internal lighting. I spent a little over $3US in materials for each air-core movement. There is about $8US in electronic parts in the VSI. Chuck in another, what??, $5~6US for mechanical things.

The round case is nice because it allows you to mount the instrument from the front, and because it's really cheap. This one was made from a bit of 2 inch electrical conduit. Unfortunately, I'm too lazy to stuff the electronics into such small round spaces. Besides, it's easier to light the faceplate with the rectangular package. Maybe I'll get enthusiastic and re-visit round packaging when I'm finished prototyping everything else, but for the time being I'll stick with the boxes.
This is not what's inside the air-core movements I've made so far (as of 16 April 2008), but it could be. Since I started experimenting with DIY air-core movements, the availability and selection of magnets has grown significantly. Of particular interest are the rare earth cylindrical magnets which are magnetized through the diameter and have axial holes. That sort of geometry makes building the movement much easier.
Here are a few pictures of a prototype made 17 April 2008:

It works. The question is how accurately?
Further development (24 April 2008)

Here's where things sit as of 27 April 2008:
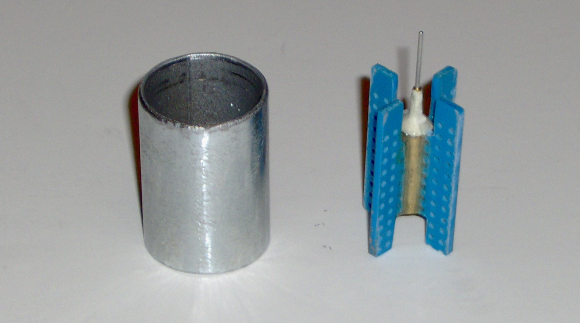
This prototype has "production style" windings of 1,000 turns each of 38 gauge wire. This is what you'd want if you plan on using the movement inside an instrument gauge. With this many turns, the rotors responds rapidly with 50 milliamps of drive.
The movement should be magnetically shielded to prevent it from being influenced by stray fields, as well, as to prevent the field from its rotor affecting things around it. The shield used here is a 1-1/2" length of 1" thin wall electrical conduit ("EMT").
There's still room for improvement, but overall this version works well.
It's cheap, too. The Super Magnet Man sells the rotor magnet for 35 cents. I think I used "Cyl140". The shaft is a few cents worth of 0.031" stainless steel spring wire. Bigger hobby shops sell it in three foot lengths, or you can buy 100 one-foot pieces from an industrial supplier like Enco or MSC Supply for about $15. Or you can simply use a #7 sewing needle. Its diameter is a bit smaller, but still workable. The body is made from 9/32" brass hobby tubing. A foot goes for $2~3. The bushing is 1/16" brass tubing at $1~2 a foot. The wire guides (the "fins") are cut from scrap electronic prototyping board. A few more dollars if you have to buy a chunk of proto-board. The wire's probably the hardest material to get. Not too many local places stock wire this fine. You can order it through Mouser, but at a quantity that is likely prohibitively large. Ebay may be a better choice. If you have to buy everything in quantity, you might be in the $50~70 range, but you'll have enough material for beaucoup movements. If you can scrounge scraps, you can get by with a lot less $$ and still have enough material for several movements.
Finally, this is the slightly tweaked design. I've extended the wire guides a bit.
Here's an update as of 22 August 2011...
I'm now using a shorter magnet in the rotor. It's 5 mm long as opposed to the 10 mm magnet used above. The shorter magnet provides good torque with less weight. Less weight means less friction seen in the bushing. The rotor shaft is 0.033" stainless steel wire. I used a 0.0335" (0.85mm) drill bit to open up the 1/16th inch tubing used for the bushing. This gives a closer, smoother fit.
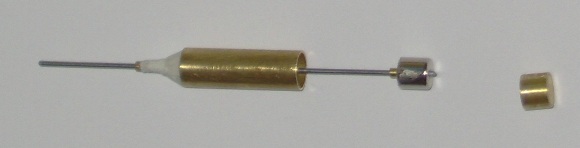
I'm using the extended wire guides which better holds the field windings in place. They are shaped slightly differently compared to the above illustration.
Each field winding has 600 turns of #38 enameled wire. This works well when powered from 5 volts. The second winding is longer than the first because it crosses over the first at the ends. This gives the second winding more resistance than the first. The first winding will be driven through a series resistor so that the two windings display the same effect on rotor positioning.
The magnetic shield is a short length of 3/4 inch galvanized thin wall electrical conduit.